
这是金属加工(mw1950pub)发布的第12944篇文章
编者按
《工业机器人设计及控制》这本书是针对当前机器人设计及控制等理论知识相对独立的问题,对机器人设计要求与基本参数、工业机器人系统与配置、工业机器人结构及特性分析、工业机器人优化设计以及工业机器人控制等问题进行了较为深入的探索,以解决工业机器人设计及控制中联系不紧密的缺憾。通过对机器人本体结构设计、各模块及整体建模、各模块及整体控制方法设计等的分析与探讨,实现理论与实践、软件与硬件的融合。
主要内容

图书特点
拖动右侧滚动条可以查看全目录
▼
目录
前言
第1章 相图的基本概念、术语和规则1
第1 章概述/ 1
1.1工业机器人简介/ 1
1.1.1制造类机器人/ 1
1.1.2行走机器人/ 2
1.1.3移动型机器人/ 2
1.1.4自制机器人/ 4
1.1.5人工智能机器人/ 4
1.1.6其他/ 5
1.2工业机器人与机械智能/ 8
1.2.1机器人中的机械智能/ 8
1.2.2机械智能中的关键问题/ 11
1.3本书的主要内容与特点/ 15
1.3.1主要内容/ 15
1.3.2主要特点/ 17
参考文献/ 18
第2 章机器人设计要求与基本参数/ 22
2.1机器人设计要求/ 22
2.1.1机器人运动规划/ 22
2.1.2机器人定位/ 44
2.1.3机器人导航/ 48
2.1.4机器人受力与驱动/ 51
2.2工业机器人基本参数/ 57
2.2.1机器人负载/ 57
2.2.2最大运动范围/ 58
2.2.3自由度/ 59
2.2.4精度/ 59
2.2.5速度/ 61
2.2.6机器人重量/ 61
2.2.7制动和惯性力矩/ 61
2.2.8防护等级/ 62
2.2.9机器人材料/ 62
参考文献/ 62
第3 章工业机器人系统与配置/ 66
3.1机器人系统组成/ 66
3.1.1被控部件/ 66
3.1.2驱动及检测/ 69
3.1.3控制平台/ 70
3.1.4主要模块/ 72
3.2机器人配置方案及成套装置/ 78
3.2.1机器人配置方案/ 78
3.2.2机器人操作机驱动及配置/ 86
3.2.3机器人操作机成套装置/ 95
3.3机器人系统的结构与配置实例/ 100
3.3.1机器人系统方案设计/ 101
3.3.2关节驱动方式/ 101
3.3.3机械臂功能置换措施/ 102
3.3.4机器人关节与配置/ 102
参考文献/ 109
第4 章工业机器人结构及特性分析/ 112
4.1机器人结构类型/ 112
4.1.1直角坐标机器人结构/ 112
4.1.2圆柱坐标机器人结构/ 113
4.1.3球坐标机器人结构/ 113
4.1.4关节型机器人结构/ 114
4.1.5其他结构/ 115
4.2机器人模型影响因素/ 116
4.2.1机器人形态与模块结构/ 116
4.2.2机器人全局与局部关系/ 117
4.2.3机器人建模工具/ 118
4.3机器人特性分析/ 118
4.3.1机器人运动学/ 118
4.3.2机器人动力学/ 151
4.4实例/ 165
4.4.1拉格朗日-欧拉法在两自由度机械臂的应用/ 165
4.4.2拉格朗日法在搬运机器人的应用/ 168
4.4.3拉格朗日-欧拉法在双臂机器人的应用/ 172
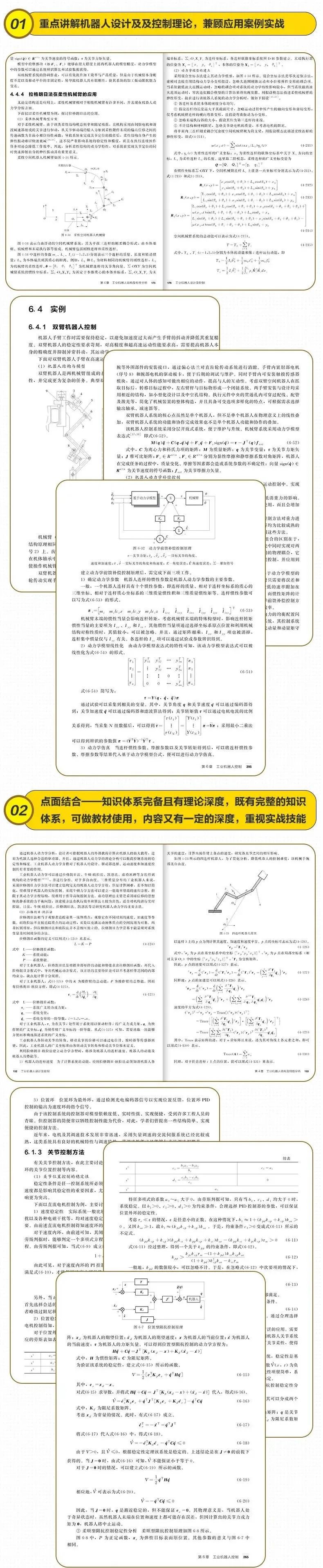
4.4.4拉格朗日法在柔性机械臂的应用/ 175
4.4.5牛顿-欧拉法在两自由度机械臂的应用/ 177
参考文献/ 182
第5 章工业机器人优化设计/ 185
5.1机构与架构的优化设计/ 185
5.1.1机构优化/ 185
5.1.2架构优化/ 203
5.2机器人杆件的优化设计/ 203
5.2.1杆件静态性能/ 204
5.2.2机械臂运动性能/ 213
5.2.3杆件力学性能/ 227
5.2.4机械臂性能测试/ 233
5.3机器人本体的优化设计/ 235
5.3.1机器人本体方案/ 235
5.3.2机器人关节对性能的影响/ 244
5.3.3本体结构及优化/ 251
参考文献/ 254
第6 章工业机器人控制/ 257
6.1机器人关节空间控制/ 257
6.1.1关节控制原理/ 257
6.1.2关节控制传递函数/ 260
6.1.3关节控制方法/ 263
6.1.4关节控制系统硬件结构/ 269
6.2机器人位置控制/ 270
6.2.1笛卡儿位置控制/ 271
6.2.2控制程序框图/ 272
6.3机器人力控制/ 274
6.3.1机器人力控制方法/ 274
6.3.2力控制关键问题/ 275
6.3.3主要部件控制/ 279
6.3.4关节控制软件系统/ 291
6.4实例/ 293
6.4.1双臂机器人控制/ 293
6.4.2多关节机器人模糊控制/ 296
6.4.3多关节机器人滑模控制/ 299
参考文献/ 301
结束语/ 304
金粉商城热门图书排行













